Robot vision
Visionguidad Robot
Flexibel produktion
Då flera varianter av en detalj skall matas och hanteras kan det i många fall vara bättre att mata fram detaljerna till ett icke förutbestämt plockläge och därefter hitta detaljen med visionssystem. Det kräver dock en mer flexibel plockenhet exempelvis robot, servodriven portalrobot eller annan enhet där olika positioner går att programmera utifrån visionsystemets koordinater. Olika belysningar kan varieras bland annat bakgrundsbelysning, ledbelysningar eller laserljus för att säkerställa en stabil plockning. AVT har ett komplett system för visionguidad plockning av matade detaljer. En intelligent lösning som gör att du enkelt kan ställa om mellan olika recept och produkter.
Olika typer av transportörer kan även användas för att separera och mata fram detaljer till plockpositioner. Matning till transportören kan delvis ske manuellt av operatör, via silos eller via en palltipp där produkten tippas gradvis mot transportör. För mindre detaljer finns vibrator separering och plockning ifrån ljusbord där integrerad tömning av detaljer också är möjlig vid byte av produkt.
När det kommer till tyngre och större detaljer kan dessa plockas direkt från pall ur förbestämda mönster eller med hjälp av visionsystem eller läsning med givare. Om produkten kommer i bulk kan ibland ”bin-picking” användas. För att detta skall fungera väl krävs dock att detaljerna har rätt utformning och många detaljer lämpar sig mindre bra. Ofta är det svårt att utforma gripdon så att alla produkter faktiskt går att plocka ur pallen vilket blir en begränsning.
Robot vision
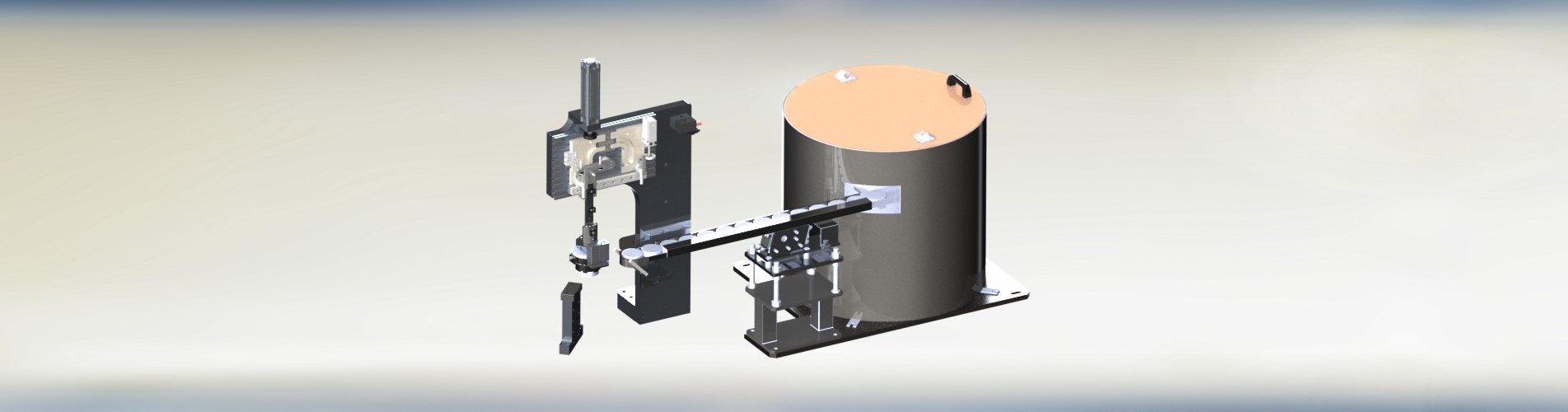
En typisk applikation som används vid höga flöden är att mata produkter under en kamera på ett transportband. Transportbandet är kopplat till en pulsgivare som känner av hur långt bandet har gått sedan bilden togs. Bilden analyseras av mjukvaran och plockpositioner på en eller flera detaljer kan skickas till robot som sedan plockar detaljen under rörelse från transportbandet.
En eller flera robotar kan placeras efter varandra och plocka produkter från banan. Här används ofta ABB Flexpicker robot när flöden är höga eftersom denna har en plockhastighet på ned till 0,5 sekunders cykeltid. Genom att använda visionsystem och robot kan olika varianter lättare hanteras och omställningar mellan produkter förenklas.
Vi föreslår rätt matningsmetod till din produktion och är inte låsta till att använda en specifik teknik.


AVT är en funktionsleverantör inom Industriautomation och produktionsteknik som utvecklar avancerade systemlösningar för industrin.
![]()


Passion for Production
Kreditbetyg
Kontakta oss
Industrigatan 1
441 38 Alingsås
Hantverksvägen 15
436 33 Askim
Tel: 0322-64 25 00
2025 © AVT Industriteknik AB. All Rights Reserved.